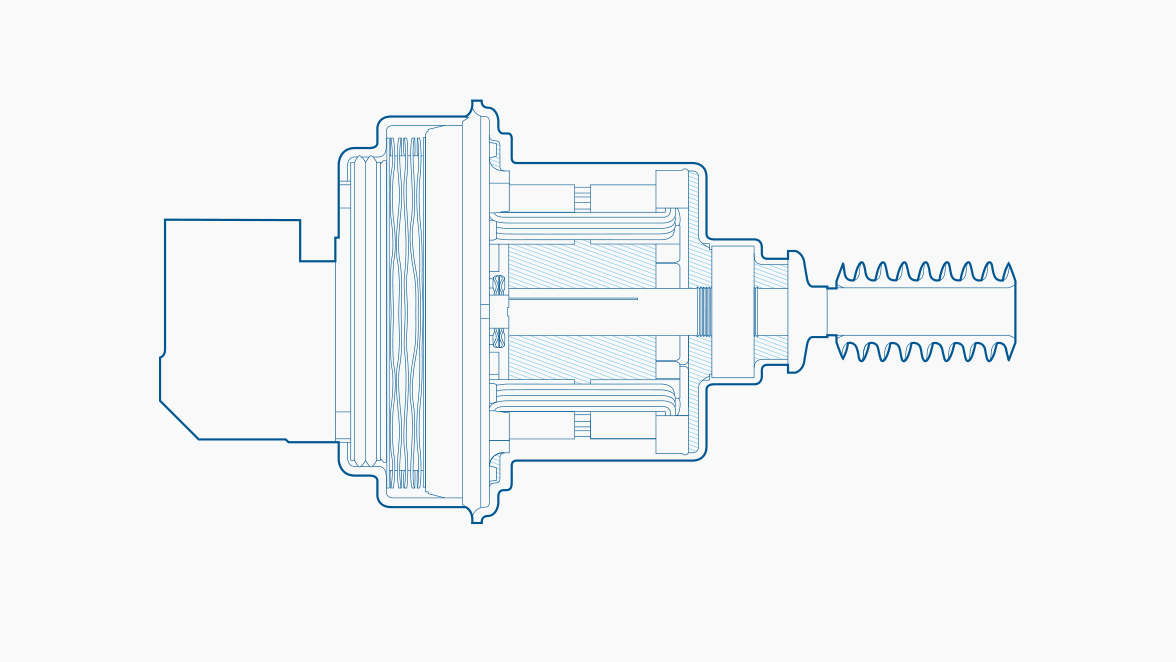
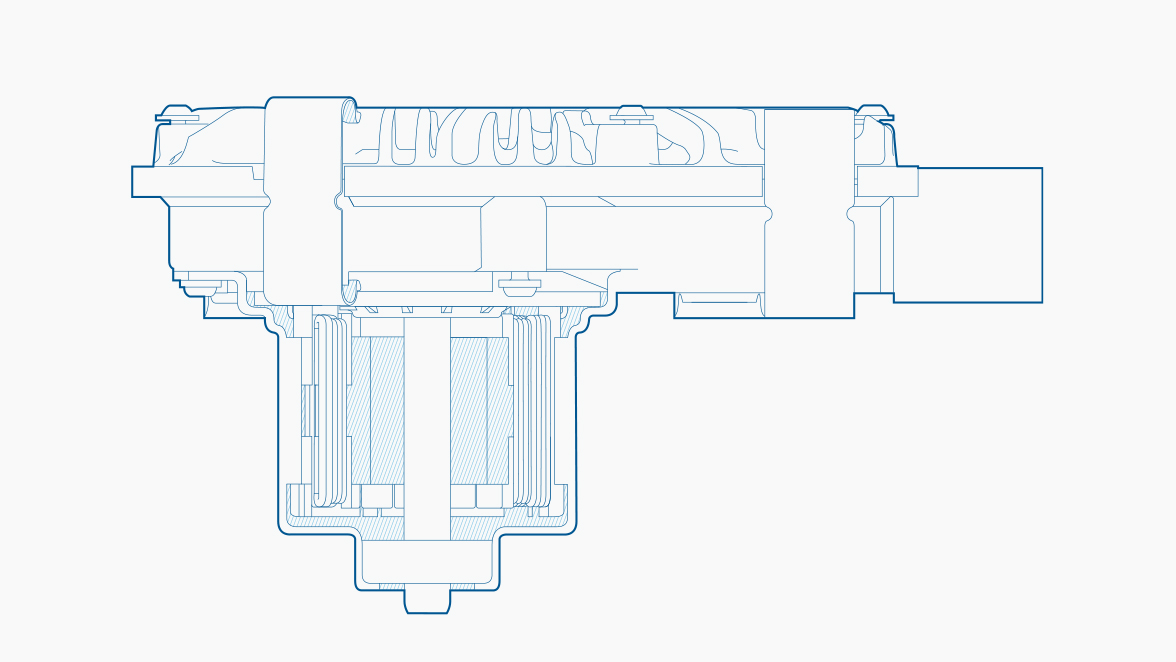
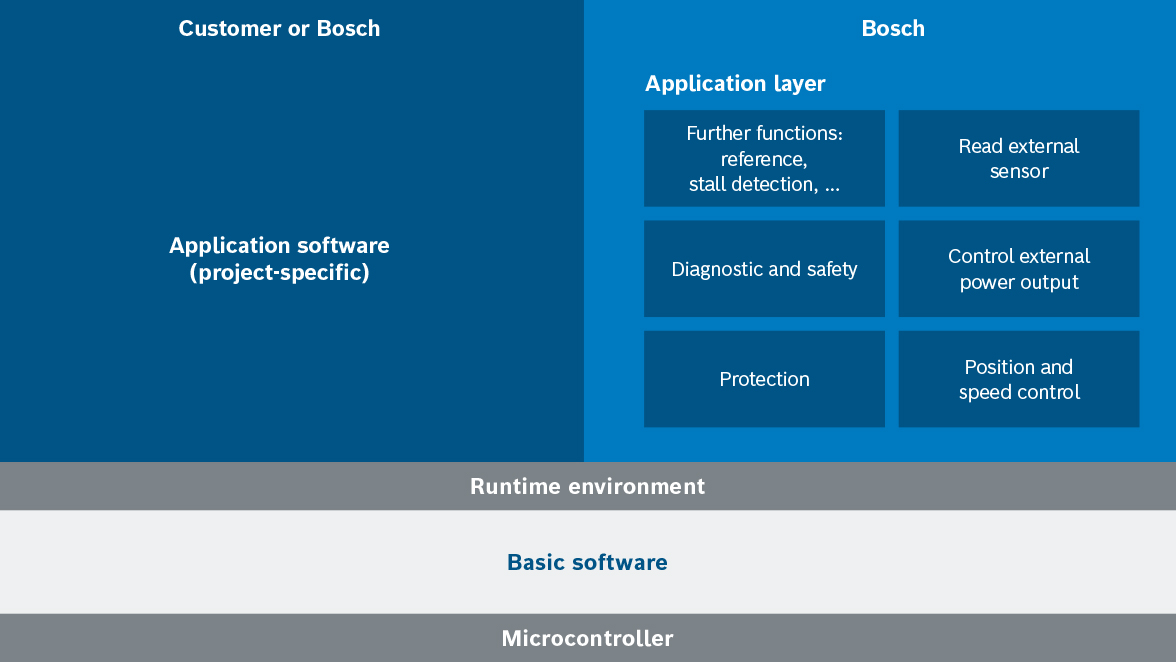
Bosch is driving e-mobility with innovative and economical solutions. Electric powertrain solutions for passenger cars, commercial vehicles, and two-wheelers are becoming increasingly complex. The ability to adapt them easily to different application requirements is therefore more important than ever. The ECA (electronic compact actuator) helps to realize efficient, economical solutions for powertrains with its scalable, modular hardware and an AUTOSAR software platform.
Universal
for a broad range of powertrain and chassis applications
Scalable
in terms of torque and power level
Intelligent
software solutions for all aspects of the powertrain
Modular
in terms of electronic configuration