


Sie haben Interesse an unseren Lösungen? Dann schreiben Sie uns eine Nachricht. Unser Vertriebsteam hilft Ihnen gerne weiter.
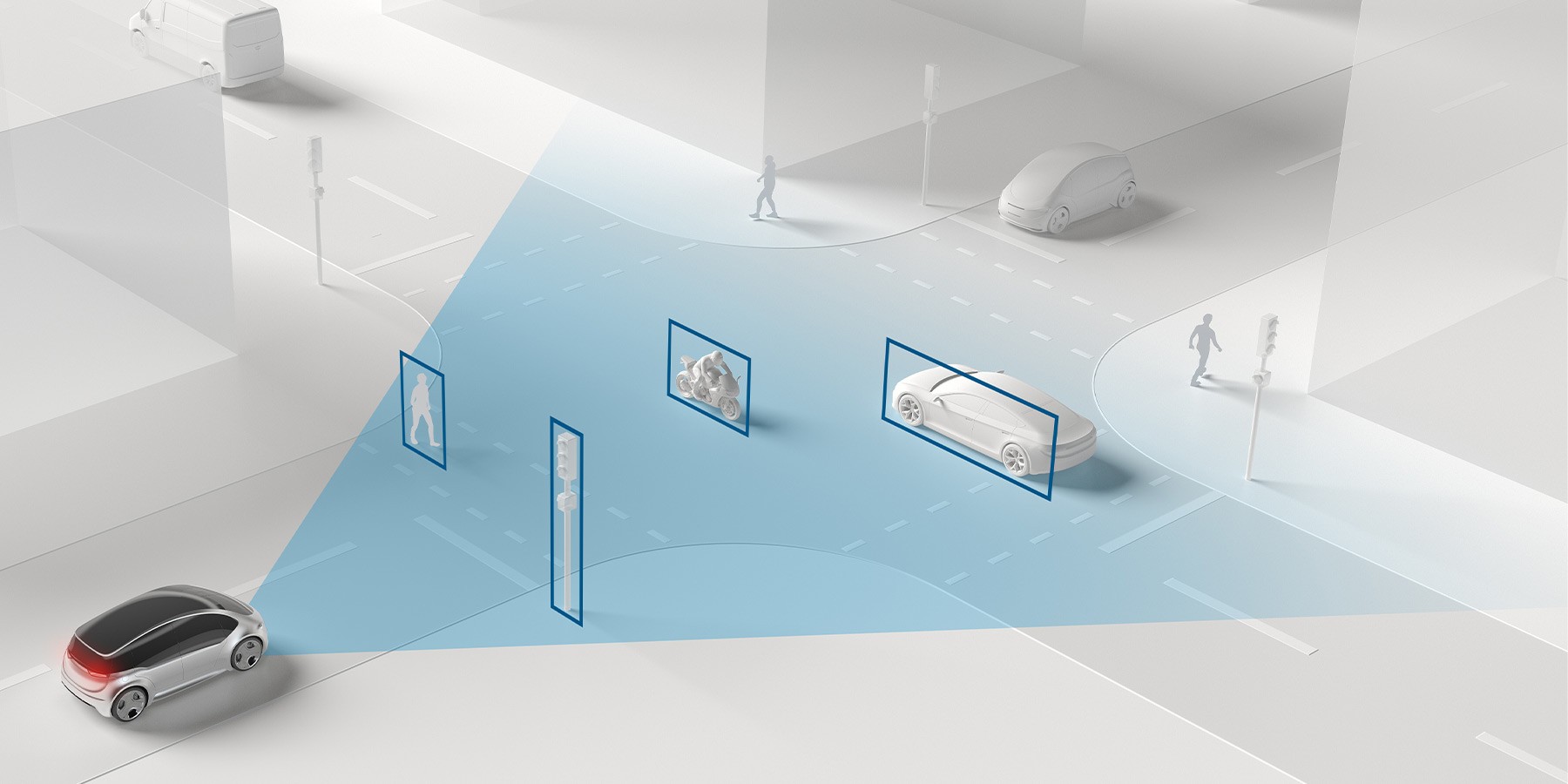
Anfrage startenUm selbstständig und sicher fahren zu können, müssen automatisierte Fahrzeuge mithilfe ihrer Sensorik die Umgebung sowie den Fahrzeuginnenraum immer im Blick behalten („Sense“).
Kameras, Radar-, Ultraschall- und Lidarsensoren sind die Augen und Ohren des automatisierten Autos und liefern die Informationen, auf deren Basis das automatisierte Auto sein komplettes Umfeld erfasst.
Durch zusätzliche Innenraumsensoren weiß das System ständig darüber Bescheid, ob der Fahrer bei Bedarf in der Lage wäre, wieder die Kontrolle des Fahrzeugs zu übernehmen.
Automatisierte Fahrzeuge können kritische Situationen mithilfe von Umfeldsensorik früher erkennen und besser vermeiden als der Mensch.
Das automatisierte Fahrzeug kann monotone Situationen wie Staus erkennen, die Fahraufgabe übernehmen und den Fahrer so entlasten.

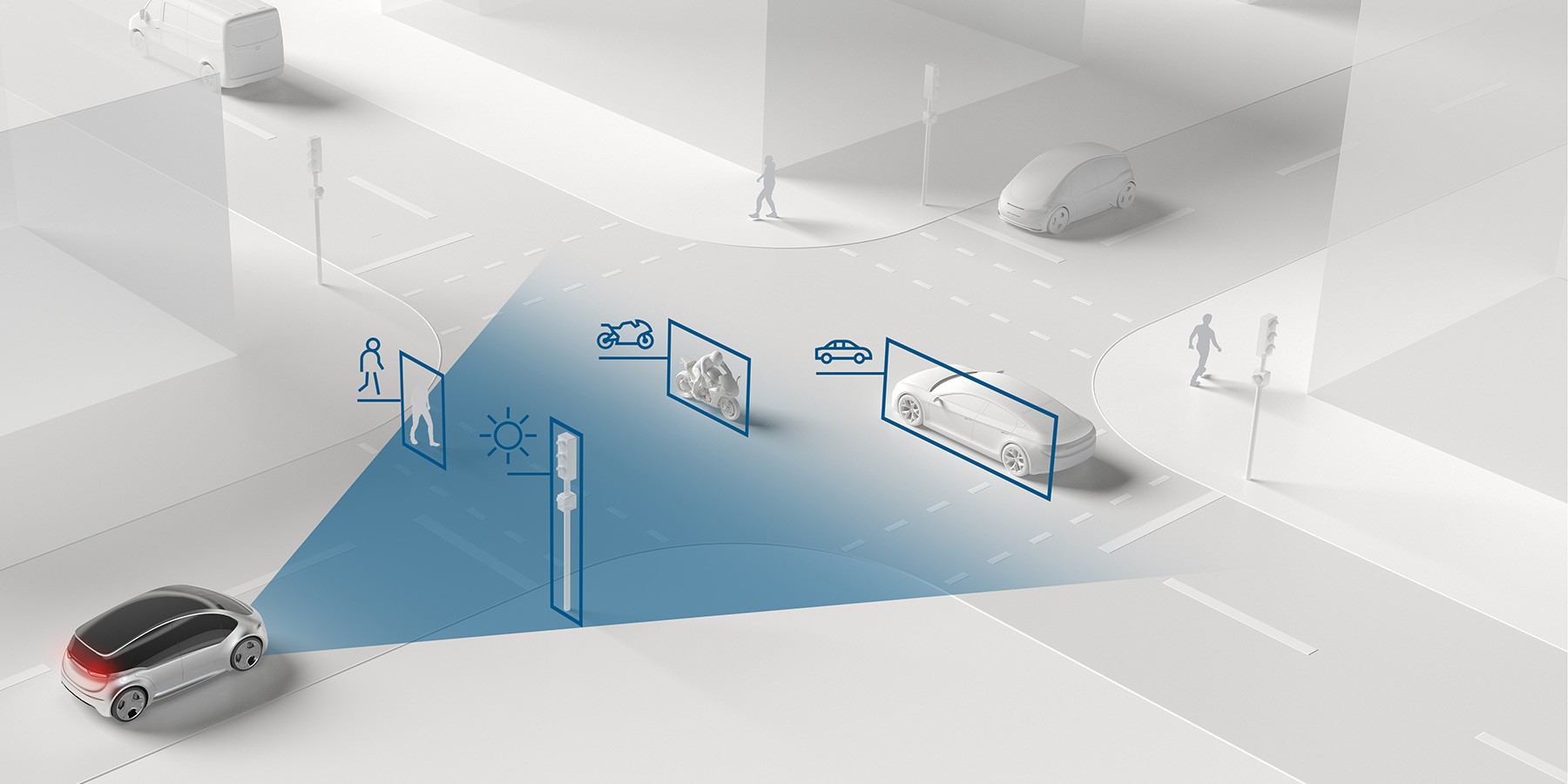
Frontkamera erkennt und kategorisiert Objekte und andere Verkehrsteilnehmer, Verkehrsschilder sowie Fahrbahnmarkierungen robust und zuverlässig und sorgt für ein ganzheitliches Szenenverständnis. Nahbereichskameras erzeugen zusätzlich ein dreidimensionales Bild der unmittelbaren Fahrzeugumgebung.
Ultraschallsensoren senden kurze Ultraschallimpulse aus, die von Hindernissen reflektiert werden (Echolotprinzip). Das ermöglicht eine sehr schnelle und robuste Objekterkennung. Aufgrund ihrer eher geringen Reichweite, finden die sie im Nahbereich Anwendung, vor allem bei Parkvorgängen.
Durch Radiowellen erkennt der vorne, hinten oder seitlich verbaute Radar unter fast allen Wetterbedingungen, bei Dunkelheit und im Tunnel mit nur einer Messung präzise Position, Relativgeschwindigkeit und Bewegungsrichtung von Objekten anhand der Dauer, die die Wellen benötigen, um zurückzukommen.
Frontkamera erkennt und kategorisiert Objekte und andere Verkehrsteilnehmer, Verkehrsschilder sowie Fahrbahnmarkierungen robust und zuverlässig und sorgt für ein ganzheitliches Szenenverständnis. Nahbereichskameras erzeugen zusätzlich ein dreidimensionales Bild der unmittelbaren Fahrzeugumgebung.
Ultraschallsensoren senden kurze Ultraschallimpulse aus, die von Hindernissen reflektiert werden (Echolotprinzip). Das ermöglicht eine sehr schnelle und robuste Objekterkennung. Aufgrund ihrer eher geringen Reichweite, finden die sie im Nahbereich Anwendung, vor allem bei Parkvorgängen.
Durch Radiowellen erkennt der vorne, hinten oder seitlich verbaute Radar unter fast allen Wetterbedingungen, bei Dunkelheit und im Tunnel mit nur einer Messung präzise Position, Relativgeschwindigkeit und Bewegungsrichtung von Objekten anhand der Dauer, die die Wellen benötigen, um zurückzukommen.
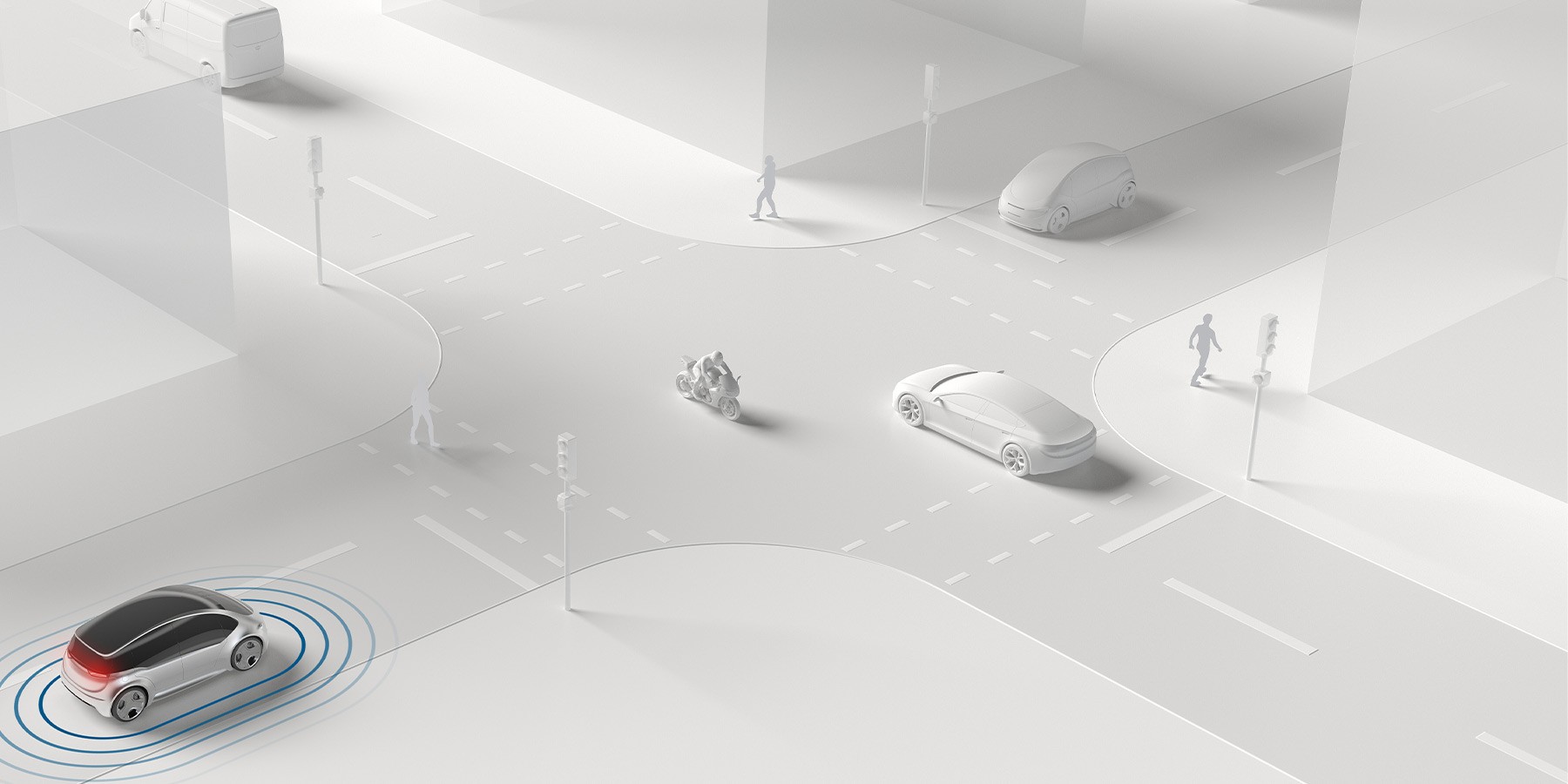
Eine wichtige Voraussetzung für automatisiertes Fahren ist die zuverlässige und präzise Umfelderfassung. Da sich das Fahrzeug im realen Verkehr selbstständig bewegen soll, muss es alle relevanten Verkehrsteilnehmer im gesamten Fahrzeugumfeld (360 Grad) erkennen und lokalisieren können. Dazu wird jeder Bereich des Fahrzeugumfelds von mehreren Sensoren mit unterschiedlichen Messprinzipien überwacht. Ein Großteil der dafür nötigen Sensoren ist bereits heute in Serie.
Um jederzeit von mindestens zwei Sensoren plausible Daten zu erhalten, ist das Zusammenwirken mehrerer unterschiedlicher Sensoren wie Radar, Video, Lidar und Ultraschall notwendig. Bosch verfügt über Kernkompetenzen in allen dieser Sensortechnologien, die es braucht, um den hohen Anforderungen an die Umfelderfassung gerecht zu werden und sorgt für deren optimales Zusammenspiel. Die Fusion der einzelnen Sensordaten vergrößert den Messbereich und erhöht gleichzeitig die Zuverlässigkeit und Genauigkeit der Messungen.
So lässt etwa die Datenfusion von Radar, Kamera und Lidar schmale Silhouetten und Kunststoffverkleidungen noch zuverlässiger erkennen. Geschwindigkeitsbegrenzungen, die die Kamera erkennt, werden von der Radarsensorik in die Fahrstrategie miteinbezogen. Die Datenfusion von Ultraschallsensoren und Nahbereichskamera ermöglicht komplexere Parkmanöver und sorgt für mehr Sicherheit und entspannteres Parken.
Eine Grundvoraussetzung für hoch- und vollautomatisiertes Fahren ist die exakte und ständig verfügbare Lokalisierung des Fahrzeugs. Ein Sensor allein kann diese Anforderungen nicht erfüllen. Deshalb wird eine Kombination von Umfeldsensorik mit Satellitennavigation und Korrekturservice sowie Inertialsensorik zusammen mit einer digitalen Karte genutzt. Zu diesem Zweck kommen hochauflösende digitale Karten zum Einsatz, die weit mehr Informationsschichten enthalten als die Karten für herkömmliche Navigationsgeräte.
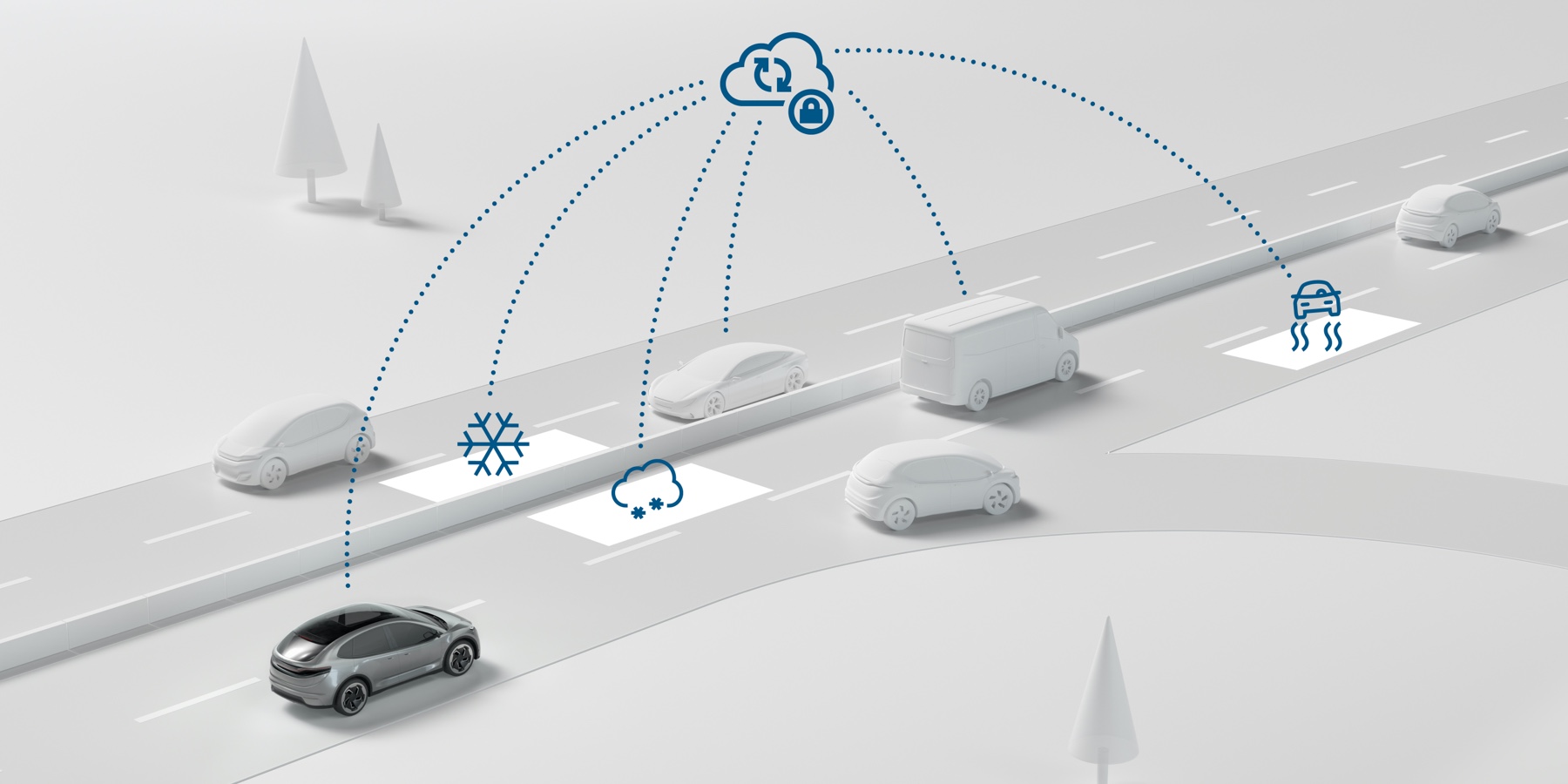
Sie helfen dem automatisierten Fahrzeug darüber hinaus bei der Planung einzelner Fahrmanöver, wie beispielweise bei der Entscheidung für einen Spurwechsel. Über die Vernetzung mit der Cloud werden die in den Karten enthaltenen Daten ständig aktuell gehalten, sodass auch dynamische Faktoren einbezogen werden können. Mit der sogenannten Straßensignatur hat Bosch eine bahnbrechende Lösung entwickelt, mit der sich wesentliche Teile der hochauflösenden Karten mittels der Radar- und Videosensorik von Fahrzeugen buchstäblich im Vorbeifahren erstellen lassen.
Sie haben Interesse an unseren Lösungen? Dann schreiben Sie uns eine Nachricht. Unser Vertriebsteam hilft Ihnen gerne weiter.
Anfrage starten
